À partir du châssis robotique de base, il est possible de construire une plate-forme de prototypage ouverte. Dans cette configuration, les composantes électroniques sont accessibles en tout temps, facilitant ainsi le travail de développement. Ce type de construction ne convient absolument pas aux essais à l’extérieur ou en milieu sale ou humide.
Composantes requises
1 plaque en ABS de 3 mm x 160 mm x 240 mm
4 morceaux d’aluminium en U de 22 mm x 16 mm
– 2 pièces de 240 mm
– 2 pièces de 115-120 mm
1 support pour 10 batteries AA
4 connecteurs terminaux (T1, T2, T3 et T4)
1 interrupteur du type industriel SPST
1 fiche 2.1 x 5.5 DC femelle, centre positif
100 cm de fil électrique de calibre 20 ou 22, couleurs noire et rouge
Vis, rondelles et écrou.
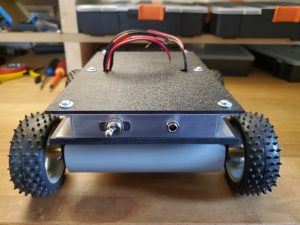
1- Structure de support en aluminium
4 pièces en aluminium de format U sont disposées de façon à créer un espace intérieur d’environ 115-120 mm x 200 mm. Ce matériel est peu dispendieux et facile à trouver dans toute quincaillerie de grande surface. Le cadre ainsi formé supportera une plaque en ABS de 3 mm ou sera installé un Raspberry Pi et ses accessoires. La pièce arrière servira de point de montage pour l’interrupteur principal et la fiche de recharge de 2.1 mm.
Le positionnement et les dimensions exactes de ces pièces seront déterminés par l’espacement relatif des supports de moteurs. Pour certains points de fixation, les vis des supports de moteur seront utilisées pour assembler les supports de moteurs ainsi que les pièces d’aluminium.

2- Système d’alimentation et de contrôle
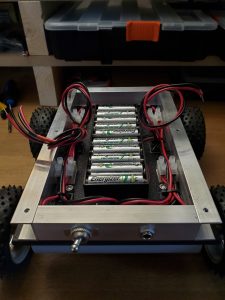
Système d’alimentation
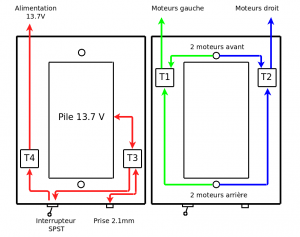
Le système d’alimentation fourni 13.7 Volts. Il alimente 4 moteurs ayant une tension nominale de 12V. Les 2 points terminaux T3 et T4 vont distribuer le courant de la pile vers la prise de recharge de 2.1 mm, l’interrupteur principal, le Raspberry Pi et les moteurs.
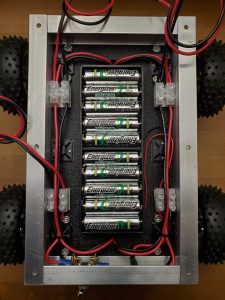
La pile comprend 10 batteries NiMH rechargeables conventionnelles de 1.37V. Cette pile se recharge directement par l’intermédiaire du connecteur de 2.1 mm à l’arrière droite. L’acheminement du courant vers le Raspberry Pi et les moteurs est contrôlé par un interrupteur SPST positionné à l’arrière gauche.
Contrôle des moteurs
Les fils des moteurs sont connectés sur les points terminaux T1 et T2 de leur côté respectifs. De chacun de ces terminaux partira une paire de fils qui se connectera à son tour sur la carte de contrôle des moteurs.
3- Fabrication de la plaque de protection
Une plaque de protection en ABS de 3 mm est nécessaire pour protéger le système électrique. Cette surface sera mise à profit pour installer un Raspberry Pi et tout autre composante utile. La plaque devra avoir des orifices pour permettre la sortie des fils d’alimentations et de contrôle.

4- Assemblage final
Il suffit de visser la plaque de protection sur le cadre en aluminium et le montage est prêt à être utilisé. Pour augmenter la résistance du cadre et assurer une meilleure sécurité pour le Raspberry Pi, il est possible de fabriquer une cage de protection. Des points de montage pour des senseurs et d’autres composantes externes pourront aussi être ajoutés.