
Il existe sur le marché plusieurs châssis robotiques mobiles permettant d’expérimenter avec un Raspberry Pi. La plupart de ces produits sont intéressants mais ils présentent presque tous des inconvénients majeurs.
Certains sont économiques mais de fabrication douteuse alors que d’autres sont de très haute qualité mais restent dispendieux et peu accessibles aux débutants.
La solution est de se bâtir soi-même un châssis à partir de matériaux disponibles sur internet et à la quincaillerie.
Ce projet vous permettra de construire un châssis robotique robuste, polyvalent et économique pour environ 125$ CDN.

Composantes requises
Plaque de protection ABS 6 mm.
4 supports à moteurs 3 mm.
4 moteurs 12 V – 37 mm – 250-300 RPM.
4 adaptateurs de roue en laiton de 12 mm, modèle long.
Tuyau ABS 40 mm (1 1/2 pouce) de 160 mm.
Vis, rondelles et écrous bloquants.

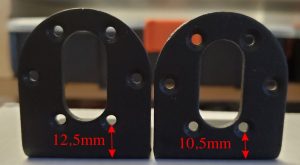
Note sur les supports de moteur
Il est important de savoir que ce projet nécessite l’utilisation de supports de moteur qui ont une distance de dégagement de 12,5 mm. Les supports de moteur ayant des dégagements inférieurs à 12,5 mm ne permettront pas d’accepter la section de tuyau ABS servant à protéger le moteur.
Étape 1 – Couper la plaque de protection à la dimension voulue
Ce projet utilisera ultérieurement un boitier de protection Hammond 1554VGY de 160 mm x 240 mm. La plaque de protection en ABS de 6mm prendra donc ces dimensions.
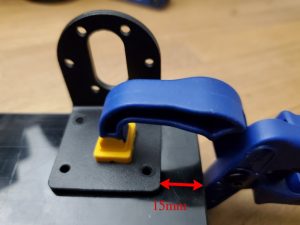
Étape 2 – Positionner, percer et monter les supports de moteurs
Il est important de laisser un dégagement avant et arrière suffisant. Cet espace de 15 mm sera mis à profit pour attacher un éventuel pare-chocs ou un support pour des senseurs. La boîte de protection Hammond présente 2 trous de montage qui donnent sur ce dégagement et qui seront utilisés.
Étape 3 – Couper et percer les protège-moteurs
Le tuyau ABS 40 mm est coupé en 2 sections de 160 mm. Un trou de 8 mm (3/8 pouces) et percé au centre pour permettre aux fils des moteurs de passer.

Étape 4 – montage des moteurs et protège-moteurs
Les moteurs sont enrobés de quelques tours de ruban électrique afin d’assurer un ajustement optimal à l’intérieur du tube ABS.

Les 2 moteurs sont ensuite insérés dans le protège-moteur et positionnés entre les 2 supports de moteurs.
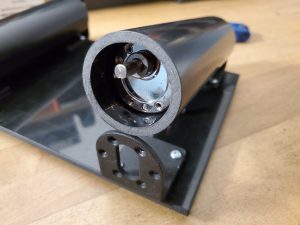
Chaque moteur est ensuite assemblé sur son support respectif.

Étape 5 – Monter les roues
Il est important de bien choisir les supports de roues en laiton qui permettent l’assemblage des roues sur l’arbre du moteur. Certains adaptateurs ont un trou latéral de fixation de 3 mm et d’autres de 4 mm.
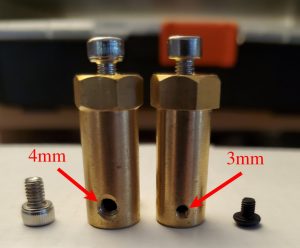
Il est fortement recommandé d’utiliser les adaptateurs avec des trous de 4 mm si votre plate-forme robotique est destinée à être utilisée à l’extérieur. Une vis avec un diamètre supérieur sera plus solide et son effet de serrage durera beaucoup plus longtemps.

Le châssis robotique est maintenant construit. Il est ensuite possible de bâtir une plate-forme ouverte ou bien fermée à partir de ce châssis.

La suite – plate-forme ouverte ou fermée
Une plate-forme ouverte présente des composantes visible et accessible en tout temps. Ce type de construction est recommandé pour le prototypage dans un environnement protégé de la poussière et des intempéries. Une plate-forme fermée présente l’avantage significatif de protéger les composantes électroniques des intempéries et des contaminants environnementaux. Sans être imperméable, elle peut résister aux éclaboussures et autres contaminants. Elle peut ainsi être utilisée à l’extérieur sans trop de risques pour les composantes électroniques internes. Un autre avantage non-négligeable est de faciliter le montage de composantes électroniques ou mécaniques supplémentaires. Un inconvénient important est le coût supplémentaire nécessaire pour l’acquisition d’un boîtier de protection de qualité.
