Après avoir réalisé la partie 1 de ce projet, il est maintenant possible de compléter la construction de la plate-forme d’expérimentation robotique.
Les composantes principales
Le premier élément à ajouter est le système de contrôle du véhicule robotique. Les composantes requises sont un Raspberry PI, un contrôleur de moteur, une interface entrées-sorties et une caméra.
Il est aussi fortement recommandé de bâtir une cage de protection autour du Raspberry Pi et de ses accessoires. Cet ajout est nécessaire car les composantes électroniques sont particulièrement fragiles et résistent très mal aux impacts, aussi minimes soient-ils. De plus, l’ajout de la cage de protection facilite le maniement du véhicule robotique lors du transport.
Construction de la cage de protection
Les matériaux qui serviront à construire la cage de protection sont disponibles à peu de frais dans toute bonne quincaillerie de grande surface. Les plaques en ABS de 6 mm peuvent être achetées sur Ebay et AliExpress.
Matériel requis.
- 4 poteaux en aluminium d’environ 50 mm.
- 2 bandes en aluminium de 240 mm
- 1 plaque frontale en ABS 6 mm x 50 mm x 160 mm pour le montage de la caméra
- Vis, rondelles et écrous bloquants
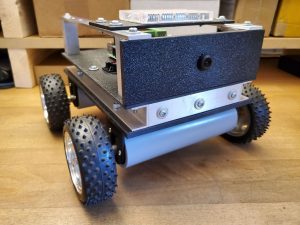
La cage de protection est bâtie à l’aide des 4 poteaux positionnés aux 4 coins de la surface supérieure sur lequel seront vissés les bandes en aluminium. Ces bandes seront percées à intervalles réguliers afin d’ajouter des points de montage pour d’éventuelles composantes externes.

Les 4 poteaux et les 2 bandes en aluminium sont vissés directement sur le châssis.
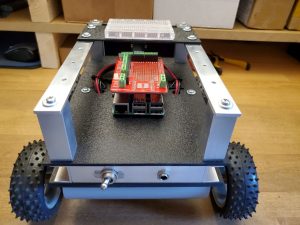
La plaque frontale est fixées par du ruban adhésif à 2 faces sur les 2 poteaux avants.
La caméra est installée sur la plaque frontale.

Ces éléments ainsi assemblés formeront une structure légère permettant l’accès en tout temps au Raspberry Pi, aux points d’entrées-sorties et aux accessoires des cartes auxiliaires. La cage de protection assure l’intégrité physique du système de contrôle en plus d’ajouter de nombreux points de montage.
Assemblage du système de contrôle
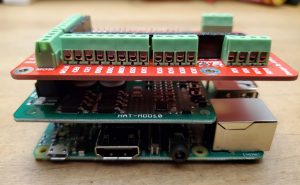
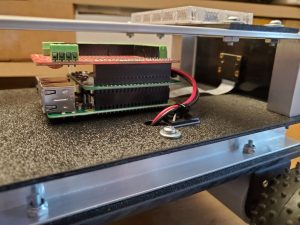
Le Raspberry Pi, le contrôleur de moteur Cytron et l’interface entrées-sorties sont assemblées à l’aide de séparateurs en nylon. La caméra est connectée sur le Raspberry Pi ainsi que l’alimentation 5 V. Les 2 paires de fils de contrôle et l’alimentation 13.7 V des moteurs sont connectés sur la carte Cytron. L’ensemble est maintenu solidement sur la plaque principale à l’aide d’une double épaisseur de ruban adhésif à 2 faces.
Matériel requis
- Raspberry Pi 3 B+
- Contrôleur de moteur Cytron HATMDD10
- Interface entrées-sorties 52pi
- 1 module caméra compatible avec le connecteur vidéo du Raspberry Pi
- Câble de caméra de 20 cm
- Points de fixation et attaches

Il est important d’immobiliser les faisceaux de fils à la plaque principale avec des points de fixation collants et des attaches. Ce détail prend son importance sachant que les vibrations des fils sont une des causes principales de panne dans les circuits de contrôle et d’alimentation.
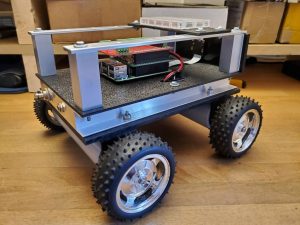
Le résultat
Une plate-forme de prototypage robotique robuste, facile à construire et économique.

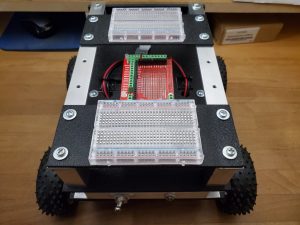
Il y a suffisamment d’espace sur la plaque principale pour expérimenter avec des composantes externes ou des microcontrôleurs auxiliaires.

Il est fort simple de rajouter une ou plusieurs plaques de type ‘breadboard’ pour assembler des circuits ou tester des senseurs directement sur le véhicule sans devoir faire de modification permanente au châssis.