
Introduction
Ce projet va vous aider à configurer un Raspberry PI comme point d’accès pouvant supporter le système de commande et contrôle d’un véhicule robotique mobile.
Interfaces réseau et robotique
Une composante essentielle pour le contrôle d’un robot à distance est un système de communication. Le véhicule robotique et la station de contrôle doivent pouvoir échanger des informations. Ce système de communication doit avoir la capacité d’envoyer les instructions de l’opérateur et lui retourner les données télémétriques des senseurs du robot. L’utilisation de la vidéo va exiger une bande passante importante et une fiabilité élevée du lien de données.
Tout à leurs honneurs, les ingénieurs de la fondation Raspberry Pi ont jugé opportun d’inclure une interface sans-fil 802.11 directement sur le circuit principal de leur produit vedette. La présence de ports USB sur la carte mère va rendre possible l’ajout de périphériques réseau supplémentaire.
Les particularités d’un système mobile devant supporter un lien de contrôle à l’extérieur va exiger une configuration réseau non conventionnelle. Le Raspberry Pi devra donc agir simultanément comme le client normal d’un réseau sans fil mais aussi comme point d’accès indépendant pour permettre une connexion directe de la station de contrôle même si le point d’accès n’est plus accessible. La nécessité d’offrir simultanément ces deux types de services va exiger l’ajout d’une interface réseau sans-fil supplémentaire sur le Raspberry Pi.
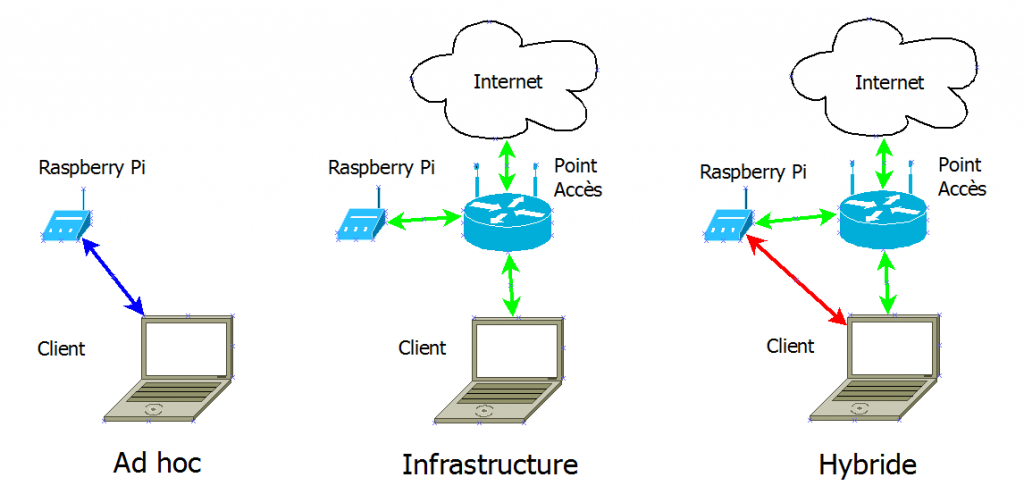
Mode ad hoc
Le module sans-fil du Raspberry Pi supporte tous les modes de connexion. Le mode ad hoc permet à deux appareils réseaux de se connecter en tant que pairs. Aucune hiérarchie ou service implicite ne supporte les échanges de données. Les configurations IP des cartes réseau doivent être appliquées manuellement. Aucun serveur d’adresse DHCP et DNS n’est disponible pour gérer les échanges de données. Ce mode est limité et présente une certaine difficulté d’utilisation. De plus, il supporte mal les fonctions de sécurité avancées.
Mode infrastructure
Le mode le plus commun est infrastructure. Il suppose une relation du type client-serveur. Une hiérarchie est établie au moment de la connexion. Le client demande au serveur la permission de s’associer à son réseau et de lui fournir les informations lui permettant d’assurer la configuration de sa carte réseau. Le serveur agira généralement comme gestionnaire du routage et fera la résolution DNS pour les requêtes du client.
La situation la plus fréquente est celle où le Raspberry Pi est un client en mode infrastructure. Cela va fonctionner tant que l’interface sans-fil du client ne s’éloigne pas trop de son point d’accès. Cette façon de faire est très peu pratique dans un scénario de robotique mobile ou votre robot sera souvent hors de portée.
Une solution hybride
Une solution simple est de rajouter une interface réseau supplémentaire au Raspberry Pi et de la configurer comme point d’accès hybride. De cette façon, l’interface client du Raspberry Pi peut établir une liaison avec son point d’accès quand celui-ci est accessible. Aucun flux de données du système de contrôle ne passera par l’interface client.
Le point d’accès hybride sera réservé aux communications du système de contrôle robotique. Il ne permettra pas de relayer les données vers l’internet comme le ferait un point d’accès conventionnel. Les deux interfaces seront actives simultanément, chacune se spécialisant dans un rôle donné.
Mode Ad hoc, Infrastructure et Hybride
La suite …