
Introduction
Ce projet va vous permettre de prendre en main rapidement l’interface de contrôle moteur Cytron HAT-MDD10. Cette carte est fabriquée spécifiquement pour le Raspberry Pi et est compatible avec son connecteur à 40 fiches.
Références
framboiserobot.ca – Fiche technique
Cytron – Description du produit
Cytron – Manuel de l’utilisateur – PDF
Cytron – Exemple de code en Python
Caractéristiques physiques de la carte Cytron HAT-MDD10
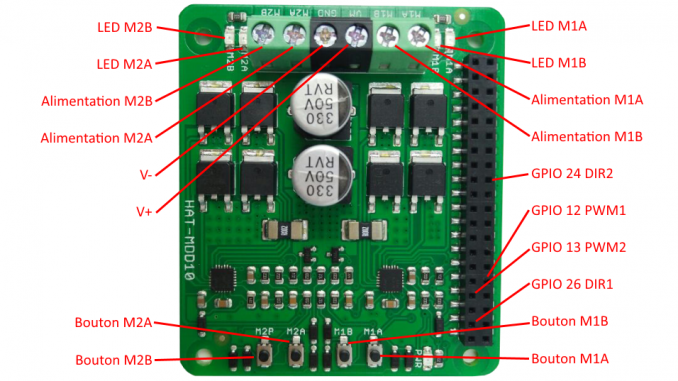
Fiches d’entrée-sorties
Quatre fiches (12, 13, 24, 26) sont utilisées par la carte de contrôle moteur. Ils ne seront plus disponibles pour d’éventuels périphériques supplémentaires.
GPIO 12 – signal analogue pour le moteur 1, puissance appliquée au moteur droit.
GPIO 13 – signal analogue pour le moteur 2, puissance appliquée au moteur gauche.
GPIO 24 – signal digital pour le moteur 2, direction de rotation du moteur gauche.
GPIO 26 – signal digital pour le moteur 1, direction de rotation du moteur droit.
Indicateurs DEL
Quatre DEL sont utilisés pour indiquer l’état du moteur.
DEL M1A – indicateur pour le moteur 1 dans le sens horaire
DEL M1B – indicateur pour le moteur 1 dans le sens anti-horaire
DEL M2A – indicateur pour le moteur 2 dans le sens horaire
DEL M2B – indicateur pour le moteur 2 dans le sens antihoraire
Boutons test
Quatre boutons sont disponibles pour tester le fonctionnement du système. Cette caractéristique est très utile pour aider à brancher correctement les fils des moteurs les connecteurs d’alimentation.
Bouton M1A – bouton test pour le moteur 1 dans le sens horaire
Bouton M1B – bouton test pour le moteur 1 dans le sens anti-horaire
Bouton M2A – bouton test pour le moteur 2 dans le sens horaire
Bouton M2B – bouton test pour le moteur 2 dans le sens anti-horaire
Connecteurs d’alimentation
Le connecteur principal, celui du milieu, va alimenter les 2 moteurs tandis que les connecteurs gauches et droits seront spécifiques aux moteurs.
Connecteur vert – Alimentation fixe pour les 2 moteurs
Connecteurs noirs – Alimentation modulée pour chaque moteur individuel.
PWM vs Digital
Les signaux d’entrées-sorties du Raspberry Pi fonctionnent sous une tension de 3.3 volts. Une modulation digitale pour un signal donné sera soit de 3.3 volts (valeur logique de 1) ou de 0 volt (valeur logique de 0). Aucune valeur intermédiaire n’est possible.
Un moteur fonctionnant sous ce mode pourrait se voir appliquer seulement 2 vitesses, maximum (1) ou nulle (0). Aucune modulation de vitesse entre ces deux valeurs n’est possible. Cela n’est pas bien pratique pour le contrôle d’un robot. Celui-ci devant fonctionner à vitesse maximale en tout temps.
Le signal du type Pulse Width Modulation (PWM) ou Modulation de largeur d’impulsion (MLI) faire varier la tension du signal entre 0 et 3.3 volts en incréments beaucoup plus petits simulant ainsi un signal analogue. Cette technique va permettre un contrôle plus précis de l’accélération et du freinage.
La carte HAT-MDD10 offres deux types de modulation “PWM”. Nous utiliserons la technique la plus simple qui est “Sign-Magnitude PWM” ou le signal de puissance et le signal de direction utilisent des fiches qui leur sont propres.
Branchements des moteurs
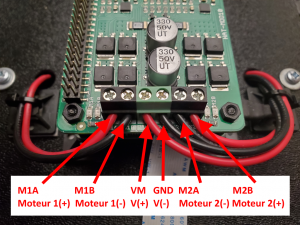
Le branchement de l’alimentation principale des moteurs doit suivre une méthode rigoureuse. Il est primordial de respecter la polarité car une erreur à ce niveau pourrait endommager votre matériel. Le fil de la tension négative (V-) de la source d’alimentation est branché sur le connecteur vert dans la prise GND alors que le fil de tension positive (V+) est branché la prise VM. Il est fortement recommandé de respecter le code de couleurs lors de la soudure et du branchement des fils de vos moteurs. Du fil rouge pour le pôle positif, noir pour le pôle négatif.
Nous parlons ici de seulement deux moteurs, mais le principe reste le même pour quatre. Il suffit que les deux moteurs de chaque côté soient connectés en parallèle. Il est important de s’assurer que le total d’ampérage des quatre moteurs ne dépasse pas la capacité du circuit de la carte de contrôle.
Alimentation négative - Connecteur GND Alimentation positive - Connecteur VM Moteur 1, pôle positif - Connecteur M1A Moteur 1, pôle négatif - Connecteur M1B Moteur 2, pôle négatif - Connecteur M2A Moteur 2, pôle positif - Connecteur M2B
Vérifications
La validité de vos branchements est facile à vérifier, utilisez les boutons test prévus à cette fin. Si vous avez respecté la polarité des moteurs, les boutons fonctionneront de la façon suivante :
Bouton M1A - le moteur droit tourne dans le sens horaire. Bouton M1B - le moteur droit tourne dans le sens antihoraire. Bouton M2A - le moteur gauche tourne dans le sens horaire. Bouton M2B - le moteur gauche tourne dans le sens antihoraire.
Conclusion
Après avoir vérifié que vos moteurs sont branchés correctement, vous êtes prêts à expérimenter avec la programmation.