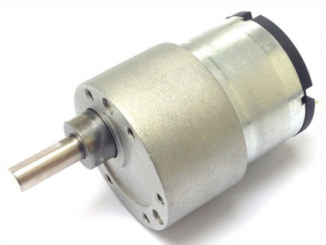
Moteur SGP30HP
Description: Le moteur SPG30HP est très puissant pour son prix. C’est probablement le meilleur rapport qualité-prix pour un véhicule robotique de petite taille. Il est …
Description: Le moteur SPG30HP est très puissant pour son prix. C’est probablement le meilleur rapport qualité-prix pour un véhicule robotique de petite taille. Il est …

Description: Le moteur XD-37GB555 est très puissant. C’est un excellent choix pour un véhicule robotique de taille intermédiaire. Il est fortement recommandé d’utiliser un contrôleur …
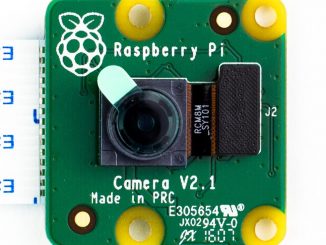
Introduction Comme nous l’avons vu dans cet article, le Raspberry Pi offre plusieurs outils facilitant la transmission d’images vidéo. Le connecteur dédié et la librairie …

Introduction Une composante essentielle pour le contrôle d’un robot est une caméra. L’opérateur doit avoir une idée précise de la position de son véhicule robotique …
Introduction Nous avons vu précédemment la méthode à utiliser pour faire varier la puissance et le sens de rotation d’un moteur. l faut maintenant être …
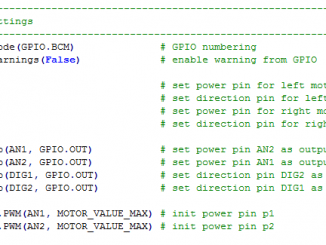
Le langage Python Le langage de programmation le plus utilisé sur le Raspberry Pi est Python. Cet exemple proposé par Cytron résume assez bien la …

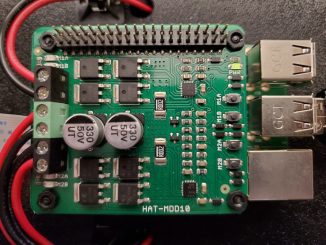
Introduction Ce projet va vous permettre de prendre en main rapidement l’interface de contrôle moteur Cytron HAT-MDD10. Cette carte est fabriquée spécifiquement pour le Raspberry …

Introduction Ce document va vous guider étape par étape pour la configuration d’un Raspberry PI comme point d’accès. Cette configuration réseau va supporter le système …

Introduction Ce projet va vous aider à configurer un Raspberry PI comme point d’accès pouvant supporter le système de commande et contrôle d’un véhicule robotique …

Objectif Ce projet va vous aider à installer et configurer le système d’opération Raspbian sur un Raspberry Pi 3 B+. Matériel nécessaire Raspberry Pi 3 …
Copyright © 2024 | WordPress Theme by MH Themes